
卫星联合增强导航技术团队—顾及电离层梯度监测的JPALS阵列接收机设计 航空学报CJA
徐鑫, 李亮, 李家祥, 蒋家昌, 危亦林. 顾及电离层梯度监测的JPALS阵列接收机设计[J]. 航空学报.
一、文章导读
研究背景
太阳异常活动等因素会造成大气电子浓度分布不均匀,导致电离层延迟呈现局部去相关特征,仅使用修正模型难以消除电离层对导航定位的影响。针对此,联合精密进近着舰系统(JPALS)利用母舰布设的多重短基线参考接收机,在载波相位层面监测电离层梯度,从而为用户提供高精度与高可靠的差分辅助增强信息。电离层梯度监测的灵敏度与参考接收机阵列构型密切相关,JPALS作为与生命安全相关的应用,高灵敏度的监测对于隔离并排除受电离层梯度影响的卫星至关重要。然而,传统平面型参考接收机阵列布设方式受限于母舰复杂姿态变化以及整周模糊度固定错误的双重制约,导致电离层梯度监测的灵敏度降低,并且母舰平台与舰岛高度等因素严重限制了参考接收机可布设范围。因此,在设计JPALS参考接收机阵列构型时需要顾及上述因素的影响。
研究亮点
针对母舰复杂姿态变化以及整周模糊度固定错误导致传统平面型参考接收机阵列的监测灵敏度降低问题,尝试探究参考接收机阵列构型从平面到空间的转化,提出一种空间型参考接收机阵列设计方法,通过构建表征电离层梯度监测盲区的代价函数,优化参考接收机阵列构型以缩小监测盲区,并基于监测盲区范围最小准则,确定北斗JPALS阵列接收机的最优空间构型,从而提升精密进近阶段电离层梯度监测的灵敏度。此外,考虑到母舰姿态的有界变化以及舰岛高程限制,还提出了满足电离层梯度监测需求的次优空间型参考接收机阵列,以提高参考接收机布设的灵活性。
本文通过实验对比了传统平面构型与所提空间构型在母舰姿态变化以及整周模糊度固定错误时的监测灵敏度,其中传统平面构型选取为平面正方形与平面“Y”型。实验中,首先控制航向角、俯仰角与横滚角各自变化,其中航向角、俯仰角与横滚角仿真范围分别为0°至360°、-90°至90°以及-180°至180°,步长设置为1°,电离层梯度仿真范围为-2000mm/km至2000mm/km,步长设置为1mm/km。通过比较电离层梯度可监测区域,对比传统平面构型与所提空间型在姿态变化时监测灵敏度的差异,具体如图1所示。图中白色表示可监测的电离层梯度区域,蓝色与红色分别表示整周模糊度固定正确与错误时的电离层梯度监测盲区。图1中,从上到下的行栏表示姿态变化,分别为航向角、横滚角与俯仰角,从左到右的列栏表示参考接收机阵列构型,分别为平面正方形、平面“Y”型、正四面体构型、次优空间构型I、次优空间构型II与次优空间构型III。
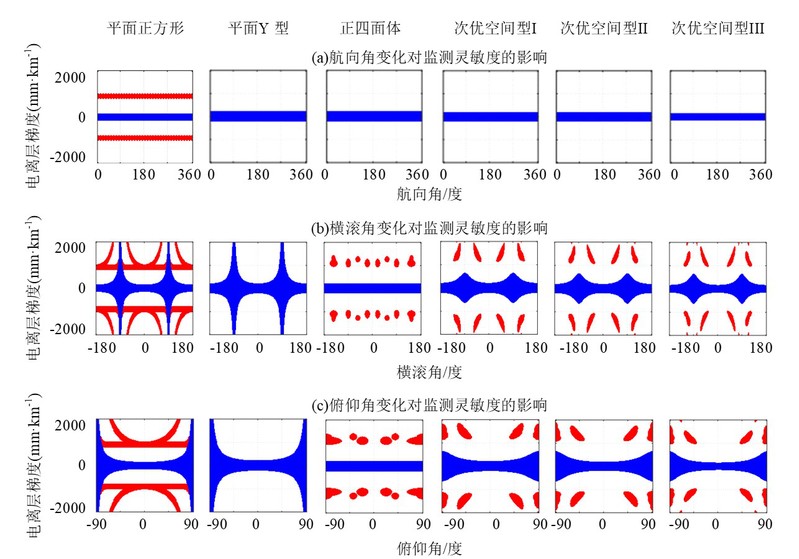
图1 姿态变化对监测灵敏度的影响
从图1中可知,姿态变化不会改变正四面体构型的电离层梯度监测盲区,其原因在于设计该参考接收机阵列构型时,约束了任意姿态下的非中心化参数偏差大于最小可监测误差,即在任意姿态下均具有足够的监测灵敏度,与理论相符。除正四面体构型外,俯仰角或横滚角变化范围增大时,会引起电离层梯度监测盲区增加,其主要原因是俯仰角或横滚角的增加,将会导致平面构型有效基线长度减小,难以对电离层梯度进行有效监测,甚至当俯仰角或横滚角继续增加时,传统平面构型无法监测任意幅值的电离层梯度。此外,从图1的后三列可知,次优空间构型的电离层梯度监测盲区虽然同样会随着俯仰角或横滚角变化范围的增大而增加,但由于存在天向的基线长度,其监测灵敏度的降低得到更为有效的控制,相比于传统平面构型具有更高的监测灵敏度,此现象展示了次优空间构型的优越性。
为验证次优空间构型的监测灵敏度在设定姿态范围内是否满足电离层梯度监测需求,图2给出了次优空间构型I、II与III适用的角度范围。需要说明的是,由于次优空间构型航向角的适用范围为0°至360°,故图2中省略了航向角信息,并且根据母舰实际运行情况,横滚角适用范围仅展示了-90°至90°的部分。
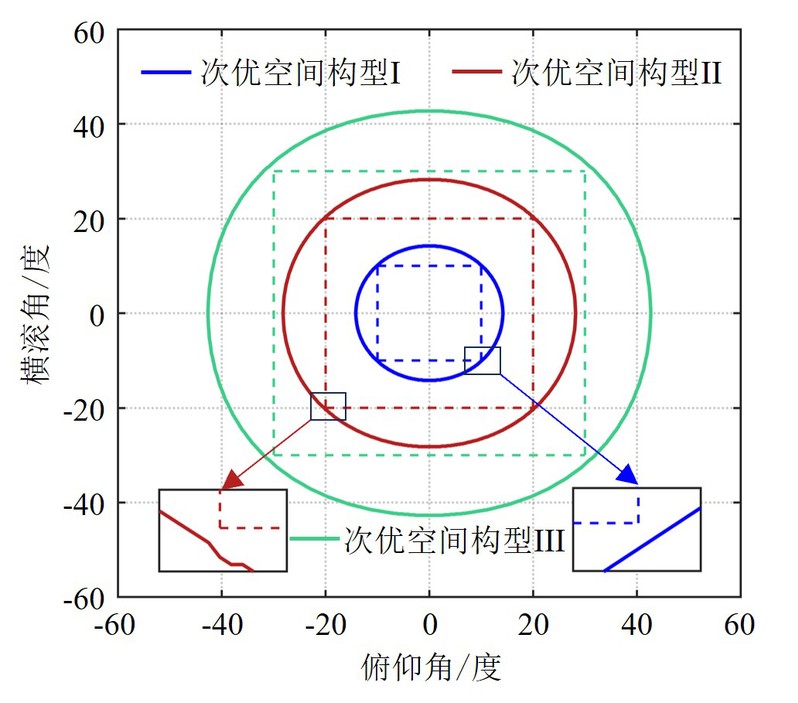
图2 次优空间构型适用的姿态范围
图2中,实线表示次优空间构型适用的姿态范围边界,若母舰的俯仰角与横滚角处于实线内部,则表明此时该构型的监测灵敏度满足电离层梯度监测需求。蓝色虚线、红色虚线与绿色虚线分别表示姿态变化范围为10°、20°与30°时对应的检测门限,若实线全部位于虚线外部,则表明该构型在设定姿态范围内的监测灵敏度满足电离层梯度监测需求。从图2中可以明显看出,次优空间构型I、II与III的姿态适用范围分别超过了10°、20°与30°所形成的设定姿态范围,有效验证了本文所提次优空间构型可选参数集的正确性。
为对比次优空间构型与传统平面构型在引入整周模糊度固定错误风险下的监测灵敏度,设置姿态变化范围分别为10°、15°、20°、25°与30°,东向与北向电离层梯度仿真范围设置为-2000mm/km至2000mm/km,步长为5mm/km。另外,由于母舰可布设的高程有限,假设最大布设高程为30米,为此,分别选取高程 h为10米、20米以及30米时的次优空间构型。其电离层梯度监测灵敏度如图3所示,图中各颜色代表的含义与图1相同。

图3 不同参考接收机阵列的监测灵敏度
图3中行栏表示不同姿态变化范围,列栏表示不同参考接收机阵列构型,通过统计图3中蓝色区域的监测盲区可知,上述参考接收机阵列构型均具有足够的监测灵敏度,再次验证了次优空间构型在设定姿态范围内的监测灵敏度能够满足电离层梯度监测需求。进一步分析表明,在相同设定姿态范围内,平面正方形的红色监测盲区范围最大,平面“Y”型次之,次优空间构型最小,并且对于次优空间构型而言,高程 h的提高同样会减小监测盲区。此外,由图3前两列可知,姿态范围增加使得传统平面构型的监测盲区变大,其原因为姿态角增加会造成传统平面构型的有效基线长度减小,导致监测灵敏度降低,并且高程 h为10米的次优空间构型同样具备该特性。但随着高程 h的增加,次优空间构型的监测盲区并未明显变大,主要由于天向的基线长度抑制了姿态角增加造成的有效基线长度缩短问题。
为定量表示所提次优空间构型的优越性,图4展示了不同参考接收机阵列由整周模糊度固定错误造成的监测盲区占电离层梯度仿真范围的百分比,其中电离层梯度仿真范围包含641601个样本点。从图4中可以看出,当姿态变化范围较小时,次优空间构型的监测灵敏度略优于传统平面“Y”型,明显好于平面正方形。随着姿态变化范围的增加,次优空间构型的监测灵敏度愈加优于传统平面构型。例如,在姿态变化范围为30°时,高程 h为30米的次优空间构型监测盲区较传统平面正方形可减少39.32%,较平面“Y”型可减少22.93%。

图4 监测盲区占比
研究结论
本文提出一种空间型参考接收机阵列构型设计方法,通过参考接收机阵列构型的设计实现缩小电离层梯度监测盲区的目的。本文对传统平面构型与所提空间构型进行了对比验证,得出如下结论:
所提空间构型解决了传统平面构型因母舰姿态变化导致监测灵敏度急剧降低的问题,例如正四面体构型的监测灵敏度能免疫母舰姿态变化的影响。此外,虽然所提次优空间构型的监测灵敏度整体上低于正四面体构型,但在设定姿态范围内的监测灵敏度与正四面体构型相当,并且次优空间型布设的灵活性更高,更适用于北斗JPALS精密进近场景;
考虑母舰姿态有界变化条件下,次优空间构型的监测灵敏度明显优于传统平面构型,其原因为天向的基线长度抑制了姿态角增加造成的有效基线长度缩短问题。如在姿态变化范围为30°时,高程 h为30米的次优空间构型监测盲区相比于传统平面正方形可减小39.32%,相比于平面“Y”型可减小22.93%。因此,即使面临恶劣海况导致母舰姿态变化范围较大时,次优空间构型仍可对电离层梯度保持足够的监测灵敏度。
二、团队介绍
卫星联合增强导航技术团队隶属于哈尔滨工程大学智能科学与工程学院,面向国家海洋强国战略,开展卫星导航高精度定位完好性监测的应用基础研究,研制多型海洋高精度北斗导航增强系统装备,并在国家多个海洋重点型号平台上得到批量业务化应用。
李亮,哈尔滨工程大学教授,博士生导师。长期在卫星导航高精度定位完好性监测方向开展研究工作,入选国家高层次青年人才计划,获得黑龙江省优秀青年基金资助。担任国际大地测量协会协同定位完好性监测工作组主席,工信部重点实验室常务副主任。作为项目责任人承担国家自然科学基金、国家重点研发计划课题、工信部高技术船、军种预研、型号科研等多个项目,主持研制多个导航系统型号装备。在国内外导航顶级期刊、顶级会议发表SCI论文40余篇。以第一发明人授权发明专利20余项,转让第一发明人的发明专利4项。曾获国防科技进步一等奖、中国海洋科学技术进步二等奖等8项省部级奖励。

徐鑫(第一作者),哈尔滨工程大学智能科学与工程学院博士研究生。主要研究内容包括高精度相对定位及其完好性监测增强技术等。
供稿:徐鑫








