
原文题目:GNSS antenna array-based visible satellite stitching method for positioning in occlusion environments
作者:李阳,贾春*,邹兆波,赵兴达,赵琳
来源:IEEE Transactions on Instrumentation and Measurement
论文引用:Y. Li, C. Jia, Z. Zou, X. Zhao and L. Zhao, "GNSS Antenna Array-Based Visible Satellite Stitching Method for Positioning in Occlusion Environments," in IEEE Transactions on Instrumentation and Measurement, vol. 75, pp. 1-15, 2026, Art no. 8507415, doi: 10.1109/TIM.2026.3687378.
原文链接:https://ieeexplore.ieee.org/document/11494760
主要贡献
针对GNSS在遮挡环境中的定位性能因信号遮挡而严重下降问题,提出了一种遮挡环境下GNSS阵列天线视场拼接(VSant)定位方法。该方法利用载体的姿态信息,补偿因天线位置不同引入的几何差异,从而实现多天线观测量的融合,有效地将信号从单个“点”接收扩展到多个天线覆盖的“区域”接收,从而增加遮挡环境下的可用卫星数量,改善卫星几何分布,提高定位精度。
研究背景
GNSS为航空、航天、陆地、海洋领域的众多应用提供了全球范围内的时空信息。GNSS信号的脆弱性导致在诸如隧道、城市峡谷和山区等环境中会出现严重的信号遮挡现象。这种可见卫星数量的减少会降低其几何分布,从而影响定位性。目前,GNSS信号遮挡问题主要通过以下方法来解决:(1) 使用多GNSS系统,即利用多个卫星星座来增加可见卫星的数量,可以改善几何分布。(2) 载体状态约束,将载体固有的运动特性加入到全球导航卫星系统模型,作为外部约束条件,增强了全球导航卫星系统的模型强度,以补偿遮挡环境中卫星可用性不足的情况。(3) 融合其他外部传感器,采用松/紧组合架构来融合互补的导航传感器,即使在GNSS不可用的情况下也能实现持续的定位服务。然而,这些定位方法的长期性能仍取决于GNSS的可用性。当GNSS长时间处于遮挡状态时,即便有INS或其他外部导航传感器的辅助,这些方法的定位精度仍可能下降。综上所述,遮挡环境下GNSS的定位性能问题仍然是亟待解决的关键问题。
算法框架
目前,一些大型船舶和特种车辆通常配置两个或多个GNSS天线来提供姿态信息。这些天线通常采用分布式布局。由于不同天线所处的遮挡条件各异,它们接收到的卫星信号也会有所不同。将分布式天线所接收到的可见卫星进行合并,形成近乎理想的开阔天空卫星视场。以双天线系统为例,视场拼接示意图如图1所示。
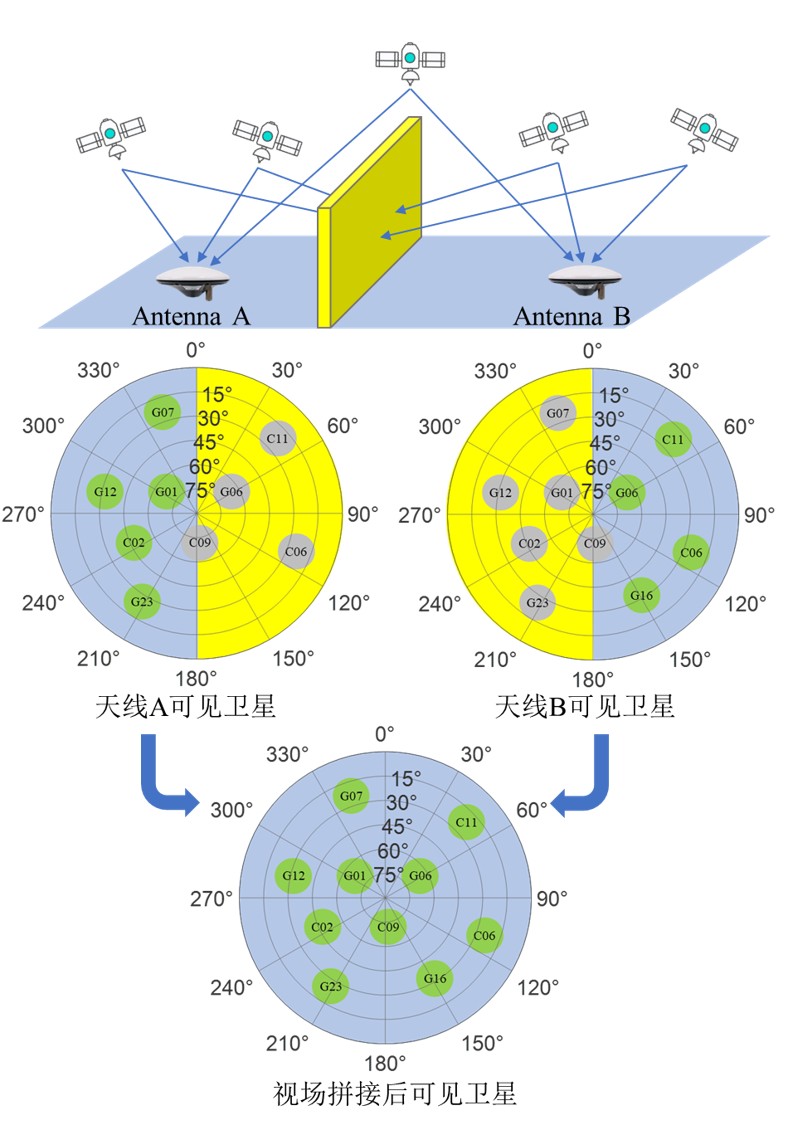
图1 视场拼接示意图
基于视场拼接概念,将以两个天线A和B为例对方法进行阐述。载体坐标系下天线A和天线B之间的向量,记为rb AB,通过将rb AB转到ENU坐标系再转到ECEF坐标系,然后投影到卫星到接收机间的方向向量es,即可得到天线B的观测量转化到天线A位置的几何修正量(L),从而实现视场拼接。如图2 VSant方法示意图。
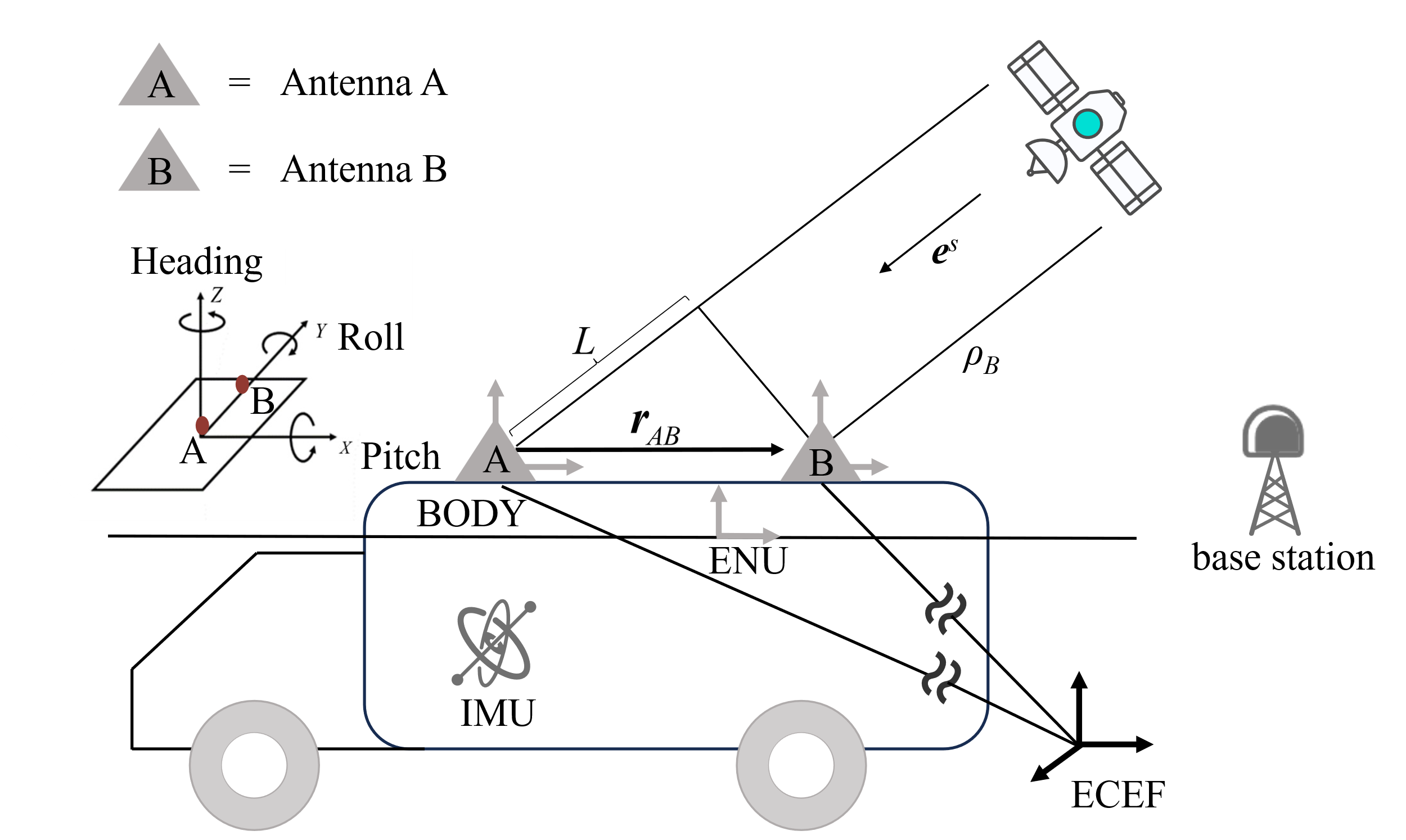
图2 VSant方法的示意图
实验验证
影响因素分析
根据理论公式系统的分析四个影响视场拼接性能的关键因素:包括载体姿态误差、初始标定偏差、天线间距以及天线布局。
姿态误差的影响
为了分析姿态精度对L(几何校正量)的影响,表1列出了三种等级的IMU参数。使用2024年1月1日CUT站静态实验数据进行仿真。图3左侧展示了三种等级IMU下L的值,右侧为L的误差,其中不同的颜色表示不同的卫星。
表1 IMU参数
参数 | σ𝛼 | σβ | σγ |
导航级 | 0.01° | 0.005° | 0.005° |
战术级 | 0.1° | 0.05° | 0.05° |
消费级 | 1° | 0.5° | 0.5° |
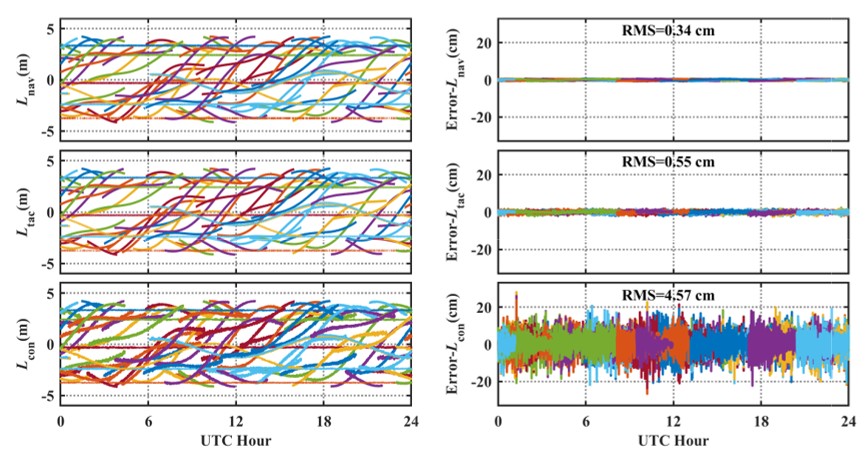
图3 不同IMU等级下L值(左)及其误差(右)
导航级IMU和战术级IMU对L的影响相当,而消费级IMU的影响则更为显著,RMS达到4.57 cm。如果用户要求是SPP级的精度,考虑到成本因素,消费级就足够了;然而,如果需要RTK级的定位精度,则必须使用战术级或更高等级的IMU。
初始标定误差的影响
为了分析初始标定误差对L的影响,分别在rb AB的三个分量中模拟了标准差为0.01 m(POS-1)、0.05 m(POS-2)和 0.1 m(POS-3)的随机误差。
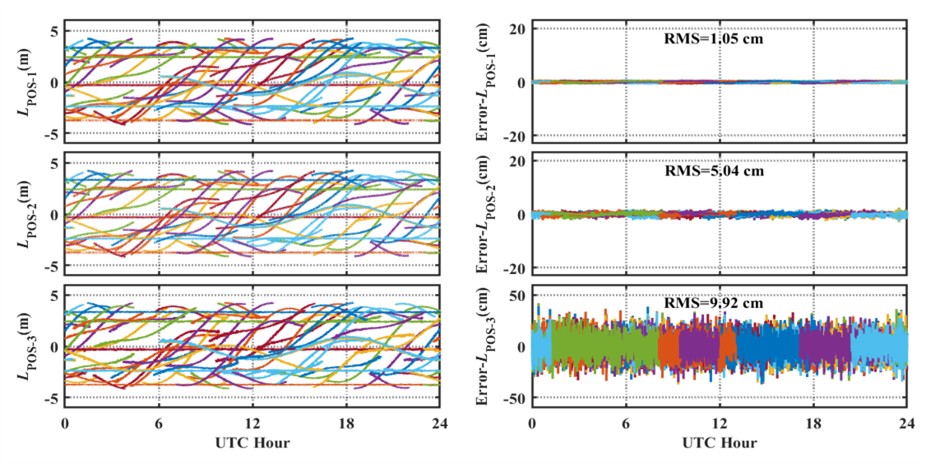
图4 不同初始标定误差对应的L值(左)及其误差(右)
初始校准误差与L的误差处于同一数量级,相当于初始标定误差会等比引入到L中。因此,进行准确的初始校准对于实现RTK级的高精度定位至关重要。
天线间距的影响
为了分析天线间距对L的影响,采用静态实验中的CUT站数据,以CUT0作为天线A,在载体坐标系中沿同一方向设置不同位置模拟天线B的观测量,同时保留原始噪声与大气特性。基线向量分别设为rb AB=[0, 1, 0]、[0, 10, 0]和[0, 20, 0],对应1 m、10 m和20 m的间距。仿真中采用了战术级IMU。
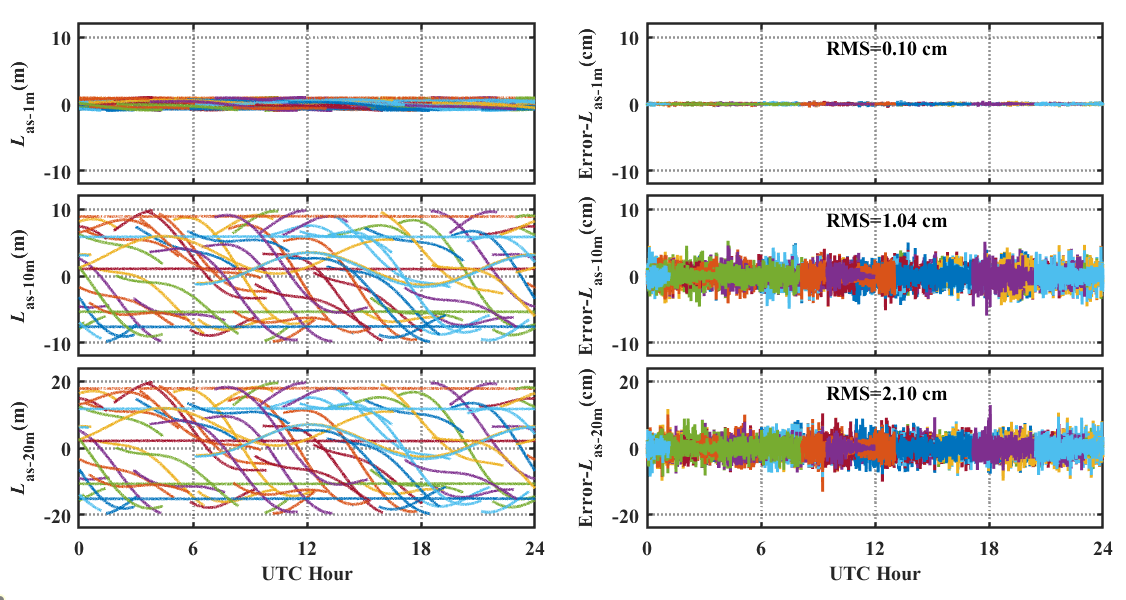
图5 不同天线间距对应的L值(左)及其误差(右)
间距与L的误差之间存在近似线性比例关系。当间距超过20 m时,L的误差将超过0.1周,将影响整周模糊度解算。因此,对于需要RTK级定位精度的应用,当使用战术级IMU时,使用视场拼接方法的天线间距不应超过20 m。
天线布局的影响
为了分析天线布局对L的影响,设计了三种基线长度均为5 m的不同布局:直角型(layout-1),基线向量设置为rb AB=[0, 5, 0] 和rb AC=[5, 0, 0];直线型(layout-2),基线向量设置为rb AB=[0, 5, 0] 和rb AC=[0, −5, 0];三角形(layout-3),基线向量设置为 rb AB =[−2.5, −2.5, 0] 和rb AC=[2.5, −2.5, 0]。
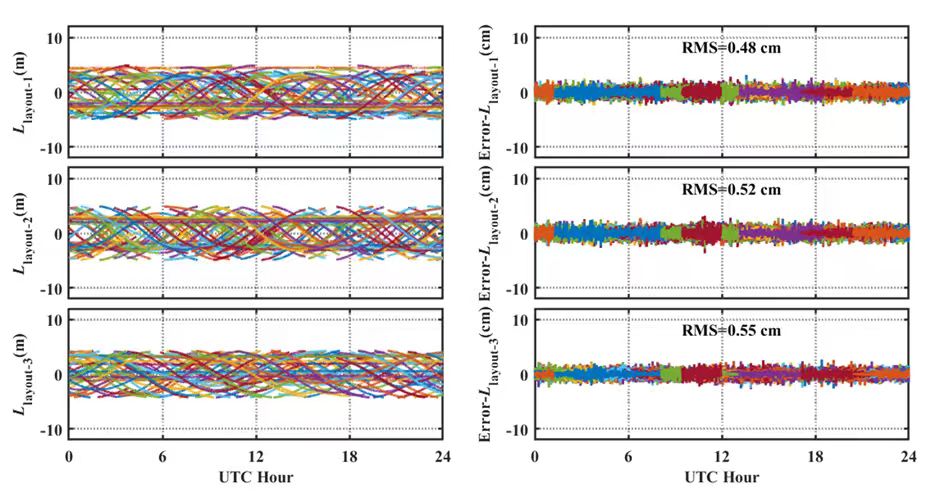
图6 不同天线布局对应的L值(左)及其误差(右)
在相同天线间距条件下,天线布局对L的影响可以忽略不计。其原因可能如下:尽管rb AB的方向决定了姿态误差矢量与基线之间的叉乘关系,导致单颗卫星在不同导航方向上的误差存在差异,但来自不同方向的多颗卫星所产生的平均效应,能有效地平滑掉这些由布局引起的差异。因此,这种平均效应使得L的整体误差对特定的天线布局不敏感。
静态实验
实验数据来自2024年1月1日澳大利亚科廷大学,可通过以下资源链接下载:http://saegnss2.curtin.edu.au/ldc。图7展示了CUT站接收机配置。为了模拟遮挡环境,天线A和B分别遮挡左右各一半方位角卫星,其中Case 1为无遮挡环境,Case 2为遮挡环境。图8展示了两种环境可见卫星天空视图的比较。图9展示了静态实验期间可见卫星的数量及GDOP。
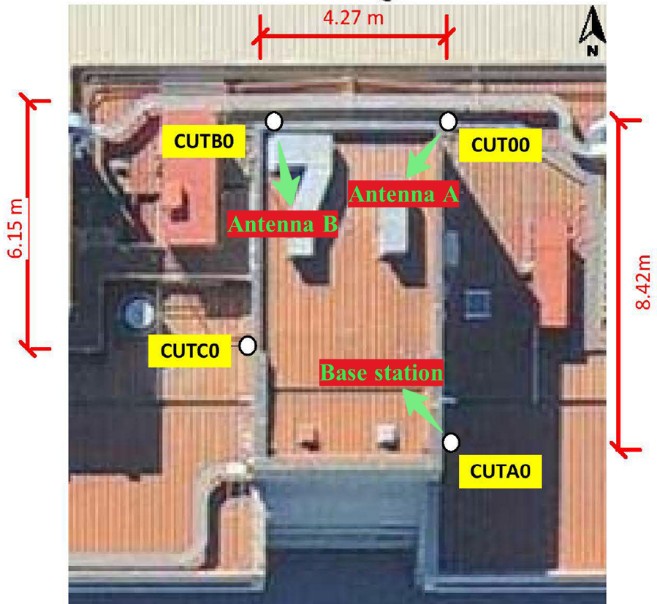
图7 CUT站接收机配置
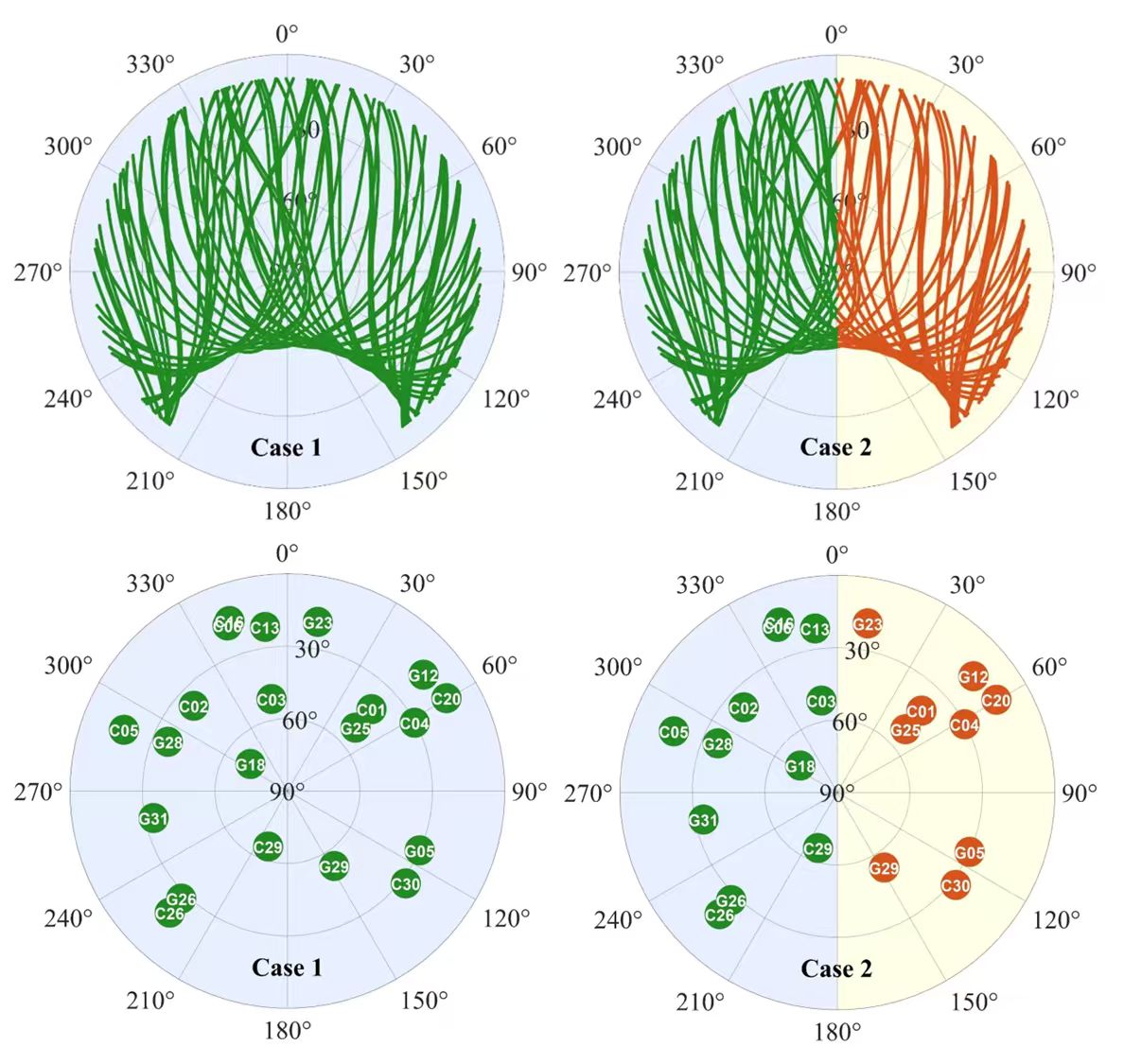
图8 可见卫星天空视图对比
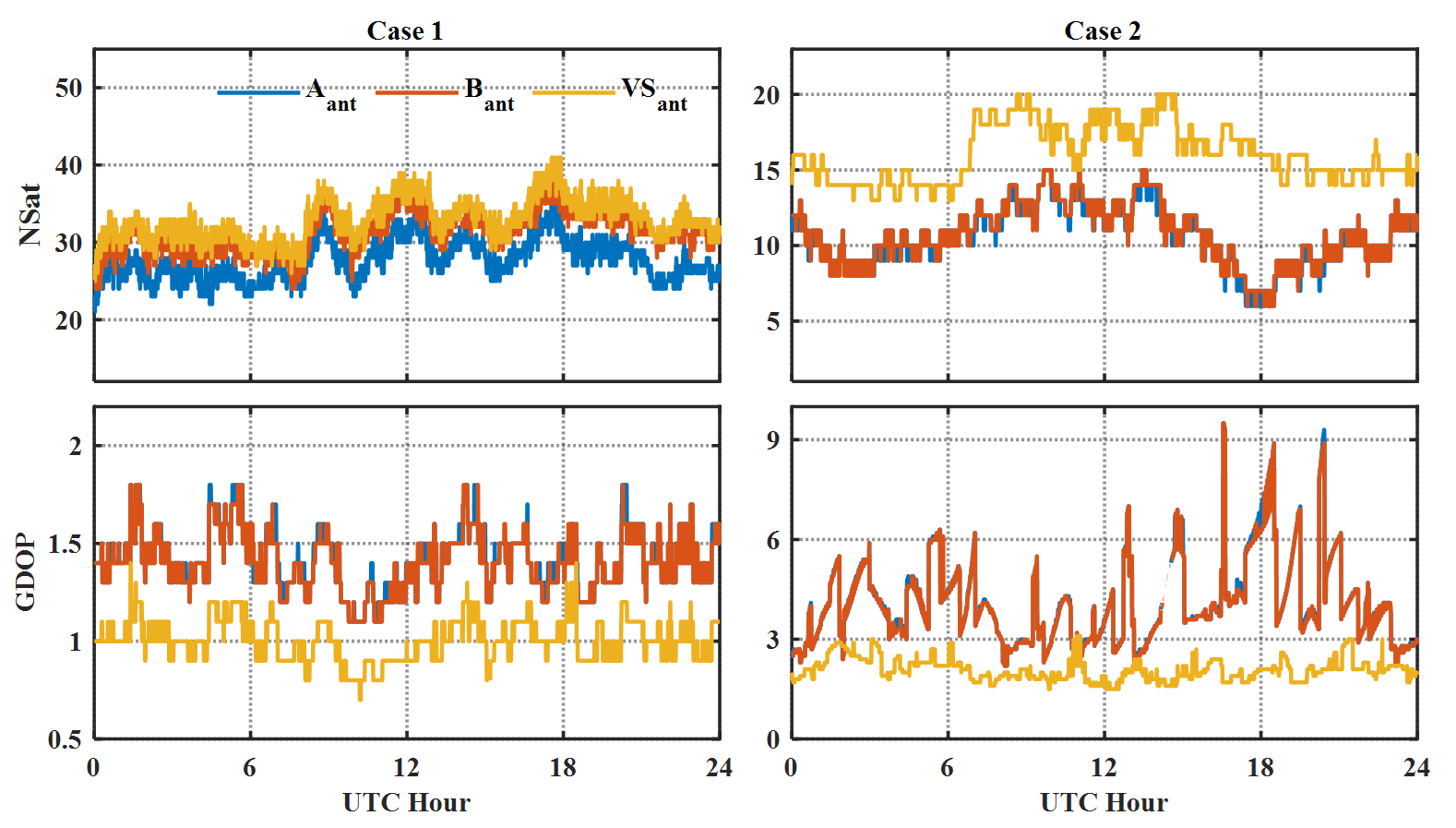
图9 卫星数量与GDOP的比较
图10−图12分别展示了在上述两种环境下,VSant方法与传统方法在SPP、RTD和RTK方面的定位精度对比情况。Aant和Bant的RTK定位结果中存在部分缺失,原因是仅展示了整周模糊度固定解导致。表2−表4展示了RMS和整周模糊度固定率,由于为静态实验,因此未考虑姿态误差。
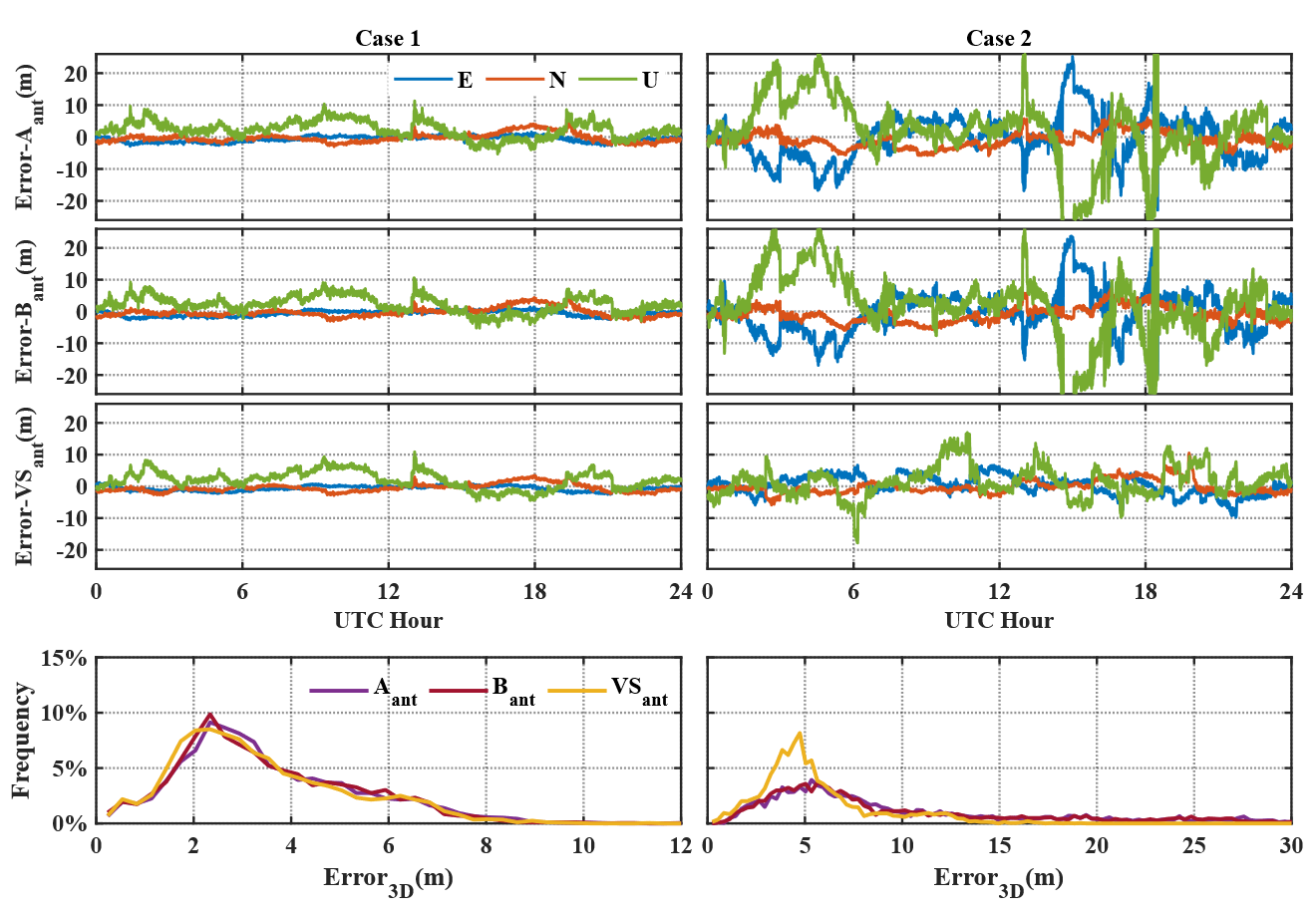
图10 SPP定位精度对比
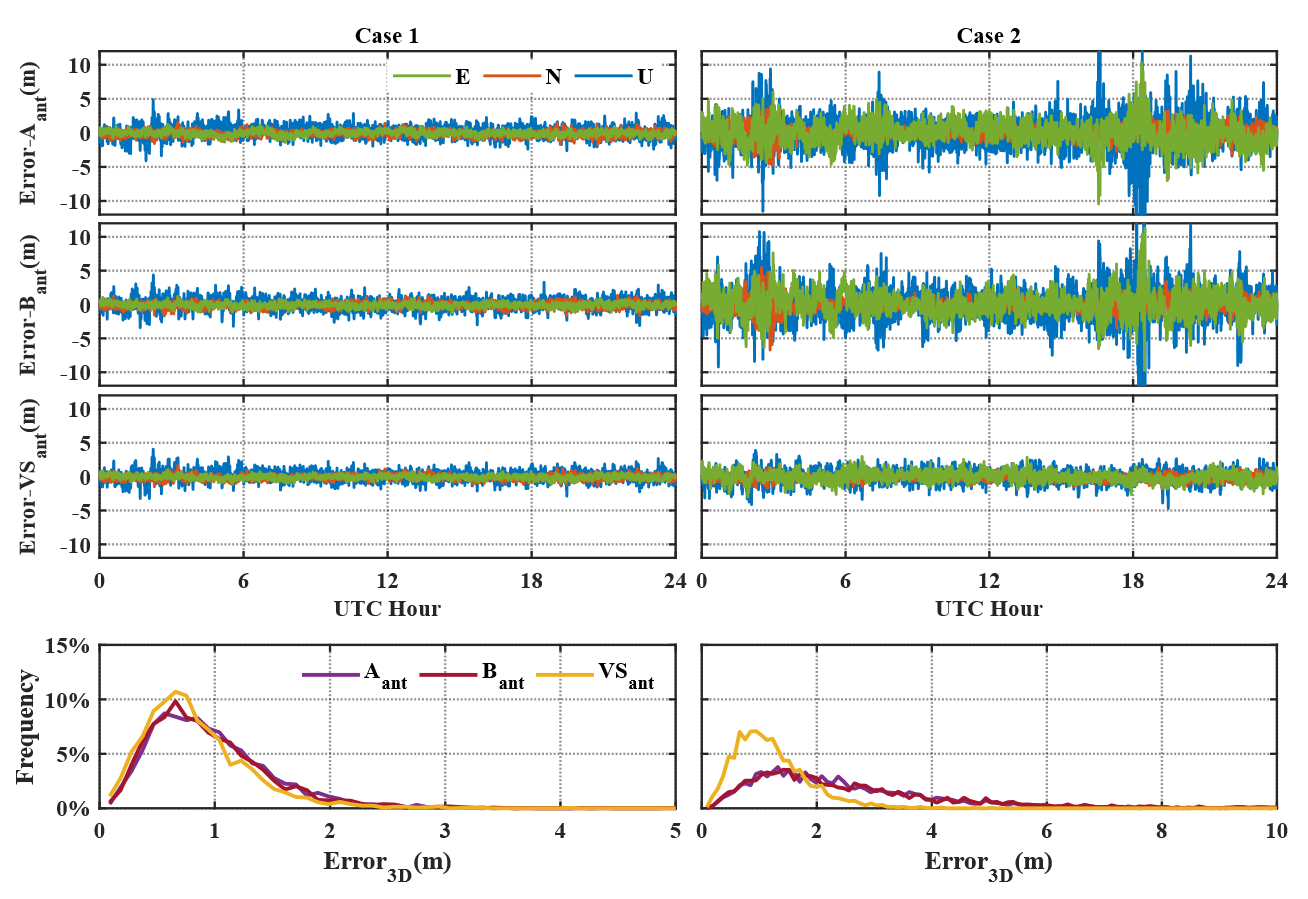
图11 RTD定位精度对比
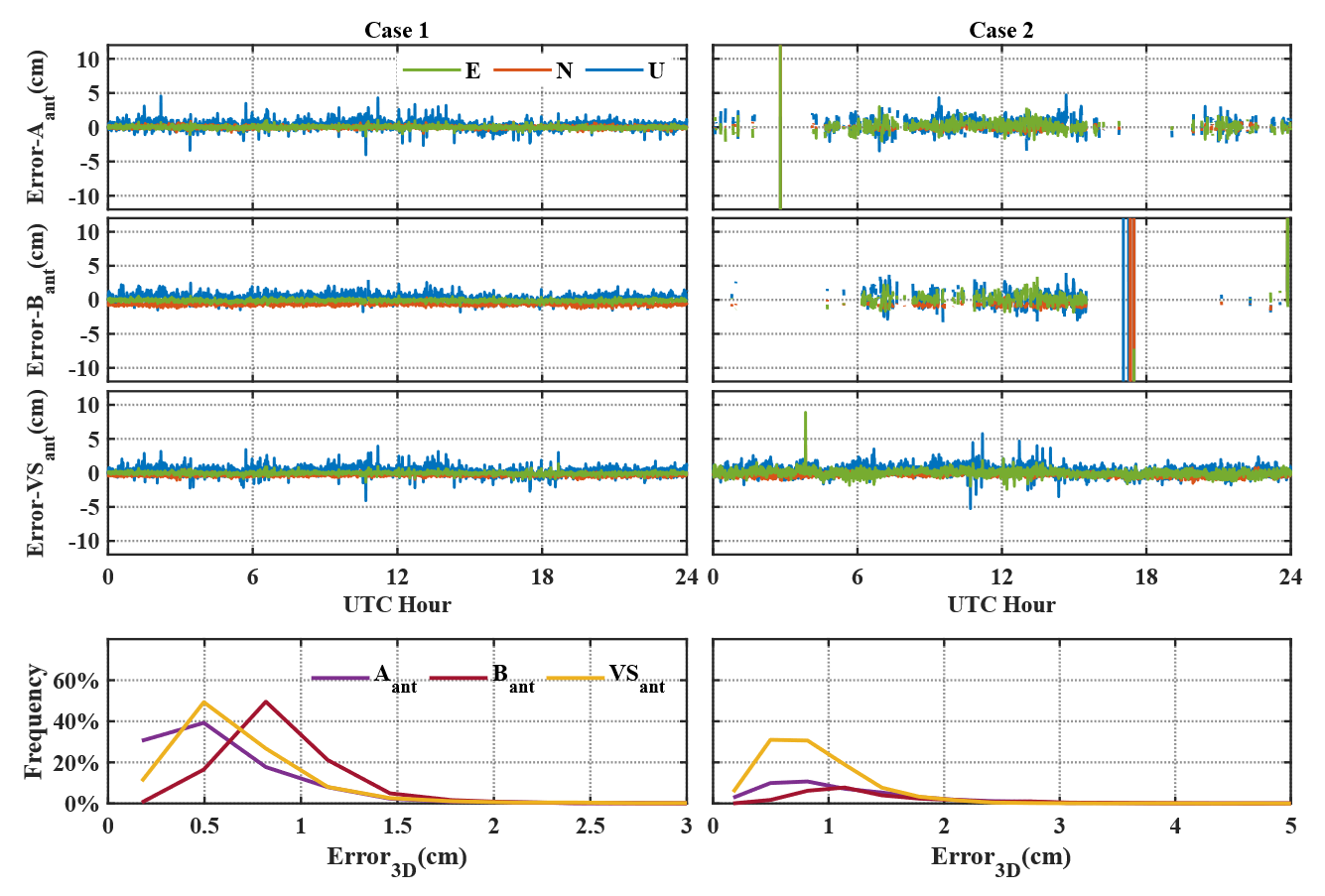
图12 RTK 定位精度对比
表2 SPP精度统计
条件 | RMS (m) | ||||
E | N | U | 3D | ||
Case 1 | Aant | 1.06 | 1.43 | 3.55 | 3.97 |
Bant | 1.05 | 1.43 | 3.48 | 3.91 | |
VSant | 0.99 | 1.34 | 3.43 | 3.82 | |
Case 2 | Aant | 6.98 | 2.66 | 11.43 | 13.65 |
Bant | 6.78 | 2.62 | 11.66 | 13.74 | |
VSant | 2.99 | 2.13 | 4.94 | 6.15 | |
表3 RTD精度统计
条件 | RMS (m) | ||||
E | N | U | 3D | ||
Case 1 | Aant | 0.37 | 0.45 | 0.91 | 1.08 |
Bant | 0.35 | 0.43 | 0.91 | 1.07 | |
VSant | 0.31 | 0.39 | 0.81 | 0.95 | |
Case 2 | Aant | 1.74 | 0.82 | 2.57 | 3.22 |
Bant | 1.82 | 0.87 | 2.75 | 3.41 | |
VSant | 0.76 | 0.47 | 1.02 | 1.36 | |
表4 RTK 精度统计
条件 | RMS (cm) | 模糊度固定率 | ||||
E | N | U | 3D | |||
Case 1 | Aant | 0.19 | 0.19 | 0.66 | 0.71 | 100% |
Bant | 0.21 | 0.68 | 0.61 | 0.94 | 100% | |
0.19 | 0.37 | 0.64 | 0.76 | 100% | ||
Case 2 | Aant | 34.02 | 22.44 | 55.98 | 69.24 | 44.24% |
Bant | 52.01 | 34.20 | 58.82 | 84.64 | 28.51% | |
VSant | 0.46 | 0.42 | 0.80 | 1.01 | 100% | |
静态实验结果可以看出:在Case 1中,与传统方法相比,VSant的性能提升并不显著,这是因为无遮挡环境观测条件较好。然而,在Case 2中,传统方法的定位性能急剧下降,SPP误差增加到13.65 m,RTD误差增加了三倍,RTK的整周模糊度固定率下降了55.8%。相比之下,VSant方法表现出了显著的改进,其在SPP和RTD方面的定位精度与开阔天空环境下的精度相当,同时仍能实现100%的RTK的整周模糊度固定率。
动态实验
动态数据于2026年3月7日在哈尔滨城市动态条件下采集。实验使用了四个天线(A、B、C和D),型号均为华信GPS500,所有接收机使用和芯星通UM982,采样率为1 Hz。天线A和B为被测天线,其基线长度|rb AB|=1.45 m,该值通过在开阔天空环境下进行静态标定获得;初始标定误差σ(rb AB)在每个方向均设置为1 cm。载体行驶过程中,车厢侧板与驾驶室会对天线A和B造成部分信号遮挡。INS型号为星际导控SNC300F-DGI。天线C作为参考,天线D用于定向,二者均与INS连接,并接收来自中国移动“One Point”高精度定位服务的基站数据,组合导航解算结果被用作位置参考。图13展示了设备安装情况和载体运动轨迹。
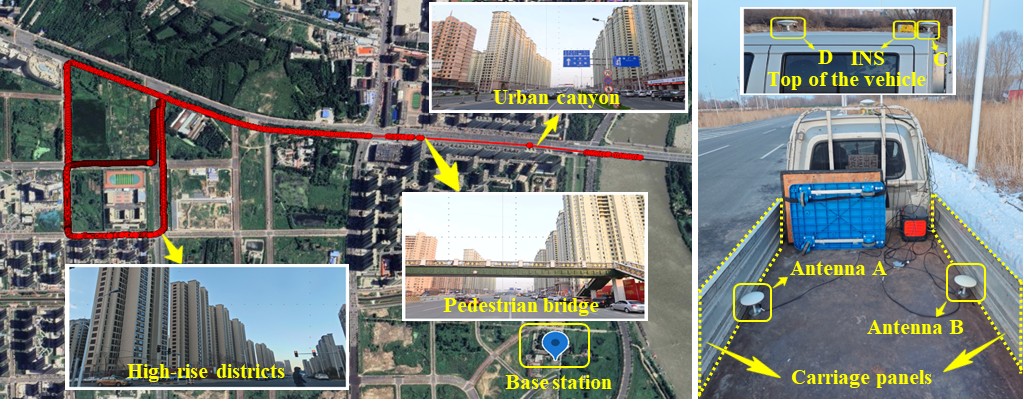
图14展示了城市动态环境下不同方法跟踪到的卫星数量,可以看出双天线接收卫星存在差异,因此使用VSant方法能够利用双天线异构的观测量。
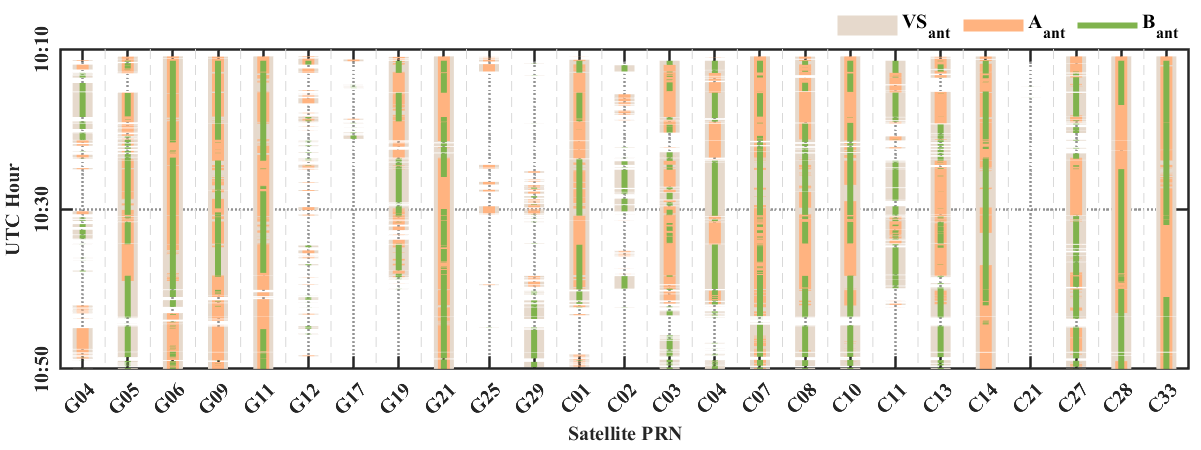
图14城市环境中跟踪的实时卫星数量
图15显示了城市动态实验期间可见卫星的数量及相应的GDOP。图16展示了使用传统方法(分别采用天线A和天线B)与VSant方法在SPP、RTD和RTK模式下的定位精度。相应的定位精度统计在表5中。

图15卫星数量(上)与GDOP值(下)的对比
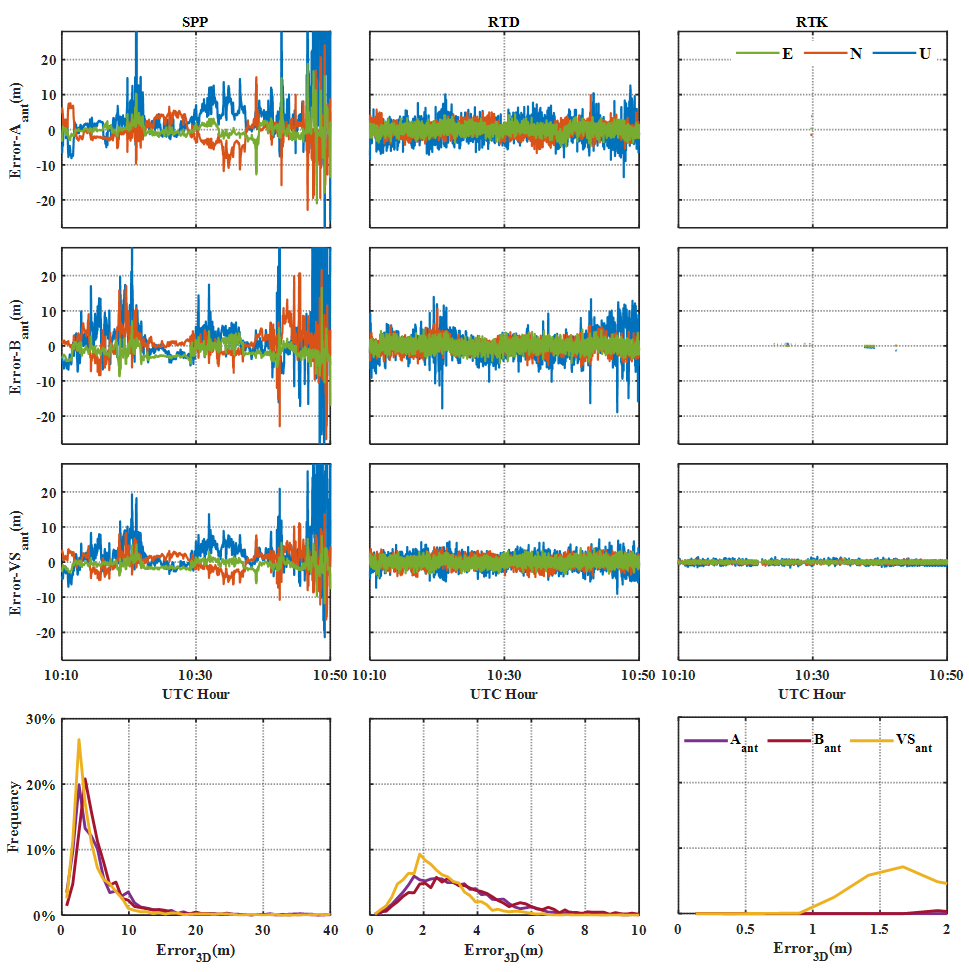
表5城市环境动态定位精度统计
RMS (m) | 固定率 | |||||
E | N | U | 3D | |||
SPP | Aant | 2.37 | 4.06 | 9.53 | 10.63 | / |
Bant | 2.58 | 4.02 | 8.72 | 9.94 | / | |
VSant | 1.57 | 2.92 | 7.07 | 7.81 | / | |
RTD | Aant | 1.28 | 1.77 | 2.87 | 3.60 | / |
Bant | 1.43 | 1.77 | 3.70 | 4.34 | / | |
VSant | 1.14 | 1.40 | 2.00 | 2.70 | / | |
RTK | Aant | 0.39 | 0.96 | 1.13 | 1.53 | 3.19% |
Bant | 0.06 | 0.11 | 0.58 | 0.59 | 8.03% | |
VSant | 0.26 | 0.31 | 0.49 | 0.64 | 85.09% | |
结果表明,在SPP模式下,本文提出的VSant方法相较于传统方法,三维定位精度提升了21.4%;在RTD模式下,精度提升了25.0%。这些结果证明了所提方法能够在遮挡环境下提升定位精度。在RTK模式下,VSant方法实现了85.09%的模糊度固定率,显著高于传统方法。对于其余模糊度未成功固定的历元,其失败原因可能是:车辆驾驶室与货厢并非完全刚体结构,导致INS提供的姿态存在额外误差,这些姿态误差影响了L值的精度,导致B天线的载波相位观测量质量下降,从而造成部分历元整周模糊度未成功固定。
总结
本文提出了一种遮挡环境下的GNSS阵列天线视场拼接定位方法,该方法利用载体的姿态信息,补偿因天线位置不同引入的几何差异,实现了多天线观测量融合,通过静态和动态实验测试,结果表明所提方法能够提高遮挡环境下的定位精度。
团队介绍
卫星联合增强导航技术团队隶属于哈尔滨工程大学智能科学与工程学院,面向国家海洋强国战略,开展卫星导航高精度定位完好性监测的应用基础研究,研制多型海洋高精度北斗导航增强系统装备,并在国家多个海洋重点型号平台上得到批量业务化应用。

贾春(通讯作者),副教授,博士生导师。主要从事GNSS精密导航与完好性监测、智能组合导航技术研究。获得海洋技术奖二等奖1项,高等教育省级教学成果奖特等奖3项,作为负责人主持国家自然科学基金、博后面上、国家科技委子课题、工信部船舶项目子课题等。深度参与重点研发计划、国家科技委、自然科学基金项目、预研项目等。在国内外权威学术期刊发表论文20余篇;授权国家发明专利9项。主讲《惯性器件及应用》、《新型导航传感器应用》、《导航定位系统》、《导航定位与授时前沿》等本科课程。

李阳(第一作者),哈尔滨工程大学智能科学与工程学院博士研究生。主要研究GNSS高精度定位。








